The typical industrial setting may have four potential areas of use for Bluetooth connectivity: As a serial cable replacement; to combine Bluetooth and Internet; to provide industrial access points for connecting several wireless devices to the traditional wired network; the provision of wireless sensors and actuators. The four categories interrelate with each other to create a system combining wireless and wired networks.
Serial cable replacement

Fig.1. Bluetooth replacing cable connection
Industrial devices using traditional serial interfaces like RS232,RS422 or RS485 are typically connected ad-hoc,often to a standard PC. The connecting software is usually application dependent or device specific. All this makes them a good candidate for a Bluetooth connection. In the example of a PC-based programmer connected to a PLC, (Fig.1) there are two ways to create a serial cable replacement. An external Bluetooth adapter could be connected to an external serial port on the industrial device or incorporated internally within the electronics. The Bluetooth adapter emulates a serial port and uses the RFCOMM protocol - which supports Serial Port Profile - to transfer data over air. The importance is that existing PC configuration and programming tools may be used.
Fig. 2. Basic architecture of serial cable Bluetooth replacement adapter
A further cable replacement option supports more advanced industrial devices with built-in TCP/IP support and web serving. In this case the Bluetooth adapter is supporting the LAN access profile up to the RFCOMM level with the rest of the software stack included in the industrial device (PPP,IP and the web serving). This allows external HMI (human machine interface)devices such as laptops or PDAs to access the built-in web based user interface of the device. No application specific software needs to be installed on the HMI device.
Bluetooth and Internet
Assume a valve with a built-in control system normally exposing its dynamic status and control variables through a standard Modbus protocol (Fig.3). An external or built-in Bluetooth adapter is attached to the device communicating to the valve using the Modbus protocol. Web/WAP pages accessed through a built-in web/WAP server display and modify the dynamic data read and written through the Modbus protocol. The pages are Bluetooth-accessible via the LAN access Personal Area Network (PAN) profile and can be used to configure, maintain and supervise the device. The architecture is described by Fig.4.

Fig. 3. Communicating via Modbus
Fig. 4. Industrial protocols other than Modbus might be used between the device control system and the Bluetooth adapter
Bluetooth enabled mobile phones with a built-in WAP user interface may also be used as the HMI. The WAP-over-Bluetooth specification includes a routing function. This allows local WAP pages to include a hyperlink to other pages located somewhere on the Wide Area Network (WAN). The WAN may be accessed using GMS,GPRS or future UMTS technologies. A typical would be where a local WAP page displays an alarm. The page contains a link to a WAN page containing detailed information about how to solve the problem indicated by the alarm state. The WAN page may be constantly updated with the most recent information on the alarm condition.
Industrial access points
The se of wireless communication in an industrial environment will be a gradual process of implementation. The starting point might be wireless islands of Bluetooth enabled devices connected to an existing wired network -which may be either standard IP-based or industrial fieldbus. The first example shown is an Ethernet-based wired network and an island of Bluetooth-enabled industrial devices (Fig.5).The industrial devices (in this case valves)are using embedded web servers over Bluetooth.
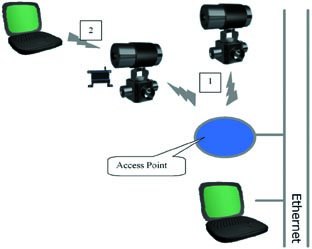
Fig. 5. Ethernet-based wired network and an island of Bluetooth-enabled industrial devices
The device built-in web-interface is accessed though the Access Point (AP)(1). The AP acts as a "telephone exchange" to connect to the individual valves. A web user hooks into the AP and, using a built-in web interface in the AP, is given a listing of all the connected Bluetooth devices are displayed. The user is chooses the desired device establishing a PAN connection to the device. In effect, the AP then acts as a router. Individual web-based HMI devices may be directly accessed using Bluetooth (2) at the same time.
A second example, Fig. 6, is a variant on the theme. The AP provides dial-in access using a modem, GSM, GPRS or future UMTS technology.

Fig. 6. Access Point provides dial-in access using a modem, GSM, GPRS or future UMTS technology
There are many types of industrial fieldbus currently in use, both standard and vendor specific. The example, Fig. 7, shows Bluetooth-enabled devices connected to an existing wired network via a Fieldbus access point.
Here, data is transferred from the Bluetooth device to the access point using a specific data transfer protocol on top of Bluetooth (1,Fig. 7). The data is converted to the format supported by the fieldbus and transferred to a requesting device connected somewhere on the fieldbus network. The Bluetooth device (2) may simultaneously be used as an Internet-device with a built-in web-based HMI, and as a data collection device transferring data to and from the access point (and further to the fieldbus).

Fig. 7. Bluetooth-enabled devices connected to an existing wired network via a Fieldbus access point
Supporting the Bluetooth LAN access profile or PAN profile with a built-in web server in the access point provides yet another option. This enables a user to view to data retrieved from the Bluetooth devices and from devices connected to the fieldbus (3) on a Bluetooth laptop or PDA, etc.
Fig. 8. Basic architecture of a Fieldbus Access Point
The data transfer protocol is a domain-specific protocol that operates on top of the Bluetooth protocol stack. It may call the Bluetooth stack on the L2CAP level or the RFCOMM level. The same protocol must be supported in the Bluetooth implementation of the industrial device. This is an area where interoperability between devices from different manufacturers is desirable and might be one of the tasks for a future Industrial Working Group within the Bluetooth Special Internet Group (SIG).
Wireless sensors and actuators
Sensors and actuators may be of different types. Some sensors and actuators have a high level of built-in intelligence others are simple I/O devices serving as a low-end interface to process equipment. Depending on this, the requirements on a wireless Bluetooth solution may differ. An intelligent device may include enough local functionality to keep the process running in a limited mode if the Bluetooth connection is lost. This may be done by dividing the control algorithm into two parts:one for the supervisory control executing on a host system and another for the mission-critical control, executing locally in the sensor/actuator.
This may also be a solution when performance criteria are higher than Bluetooth can offer. Fast control loops and fast data collection are executed locally. Slow control loops are executed over Bluetooth and buffered data are transferred the same way. This may still impose awkward demands on Bluetooth, for example time synchronisation between Bluetooth nodes.
Different process types also make different requirements on a Bluetooth solution. Some processes impose limited demands on performance and may already today be well suited for real-time control using Bluetooth.

Fig. 9. A PLC with both simple I/O devices and two more intelligent sensors/actuators. The controllers may still operate if wireless connection is interrupted temporarily
Wireless sensors and actuators are well suited to applications in moving industrial equipment. A good example might be a vibration sensor located on a moving axis. This implies a need for alternative powering solutions (for example batteries or other sources)in to sup- port a complete wireless solution. Bluetooth with its support for low power modes is a good contender,but the requirement needs special attention in development.
An example,Fig.9,shows a PLC with some simple I/O devices connected through a standard wired I/O bus and two more intelligent sensors/actuators (in this case single-loop controllers). The controllers may still operate if wireless connection is interrupted temporarily. A second example might be a control system using Bluetooth to connect up simple I/O devices. This situation requires extra consideration. It would only be suitable where the real-time requirements are low and with enough latency to allow for retransmissions if the link temporarily drops out or operates in an environment where the interference pattern is known.
Work done at connectBlue with closed loop control over Bluetooth link indicates turn around times (from controller to I/O device and back again) down to less than 15ms.
Industrial requirements on Bluetooth
While Bluetooth technology already fits many current industrial applications,there are some additional refinements for the future that could enhance its industrial potential.
Bluetooth was originally designed for communication between computer equipment, mobile telephones and peripherals .It finds use in data/voice access points, ad hoc networks, and for cable replacement purposes. Industrial applications are somewhat different. The messages are often short but typically demand robust security of delivery and fast transfer. This requires support for enhanced Quality of Service (QoS) and the ability to deal with external interference with techniques such as adaptive frequency hopping. Time stamping is also an issue.
Bluetooth has currently an ARQ scheme (except for voice packets), which makes a deterministic data transfer difficult. In future versions of the specification transparent data packets should be made available. This will allow an application to receive packets at scheduled times even if they may contain errors. The application then can decide if the packets should be retransmitted or if other actions taken. Time stamping may also require high-resolution time synchronisation amongst a group of Bluetooth devices. The demands for high resolution may require support at the lower levels of the Bluetooth stack.
Industrial equipment must cope with environmental extremes. Industrial Bluetooth should be able to withstand -40 to +80 °C, and have robust mechanical design.
Power consumption is also a concern since a supply rail is not normally available. A pure battery solution might not be attractive since the benefit of wireless is soon lost if battery replacement becomes an issue. Alternative power solutions need to be considered. Bluetooth supports low power modes, but special attention needs to be taken on an individual case basis.
Industrial Working Groups
There is a continuing effort to create an Industrial Working Group under the Bluetooth SIG umbrella. A primary objective would be to develop standards for interoperability between different types of industrial devices. Another objective is to deliberate on future changes to an industrial Bluetooth standard. The WG is not yet constituted; it currently exists only as a Study Group. A proposed charter for an Industrial WG is to be presented to the Bluetooth BARB (Bluetooth Architecture Review Board) for consideration.
This article is take over from The online Industrial Ethernet Book.
Author: Mats Andersson is Chief Technology Officer at connectBlue AB, Sweden.
Download & Links
- The online Industrial Ethernet Book - http://ethernet.industrial-networking.com/
- IEEE 802.3 CSMA/CD (ETHERNET) - http://grouper.ieee.org/
- The Official Bluetooth Membership Site - https://www.bluetooth.org/
- connectBlue - http://www.connectblue.se/
Related articles
- MODERN ELECTRONIC COMPONENTS BRNO 2003 - http://www.hw-server.com/news/modelcom.html



